

Um terremoto é um fenômeno geofísico no qual uma porção da litosfera terrestre libera energia de modo súbito (Beroza e Kanamori, 2015). A energia propaga-se sob a forma de ondas sísmicas, as quais, quando suficientemente fortes, podem ser detectadas por sismógrafos posicionados na superfície terrestre. No post de hoje, forneço uma rápida discussão acerca do uso de escalas de magnitude para terremotos e concluo com uma abordagem de modelos de recorrência.
1. Escalas básicas de magnitude
Em geral, a magnitude de um terremoto é definida como o logaritmo decimal da razão entre a amplitude A do movimento (geralmente em mícrons) e o período T da onda (em segundos); a esse valor acrescentamos uma correção f, que depende da distância angular 

Uma constante adicional é geralmente incluída para o sismógrafo e as condições subsuperficiais, mas a forma simplificada acima é suficiente para a nossa discussão. O conceito de magnitude foi proposto pelo sismólogo americano C.F. Richter em 1935; H.O. Wood, um colega de Richter, recomendou que o termo magnitude fosse utilizado no lugar de intensidade, uma vez que este último termo refere-se a escalas baseadas nos efeitos superficiais de um sismo, como tremores e danos materiais. Richter usou sismógrafos Wood-Anderson e estava estudando a atividade sísmica no sul da Califórnia, mas desde então seu modelo foi modificado e estendido a terremotos em todo o mundo.
A escala original proposta por Richter, geralmente denotada como ML, é dada por

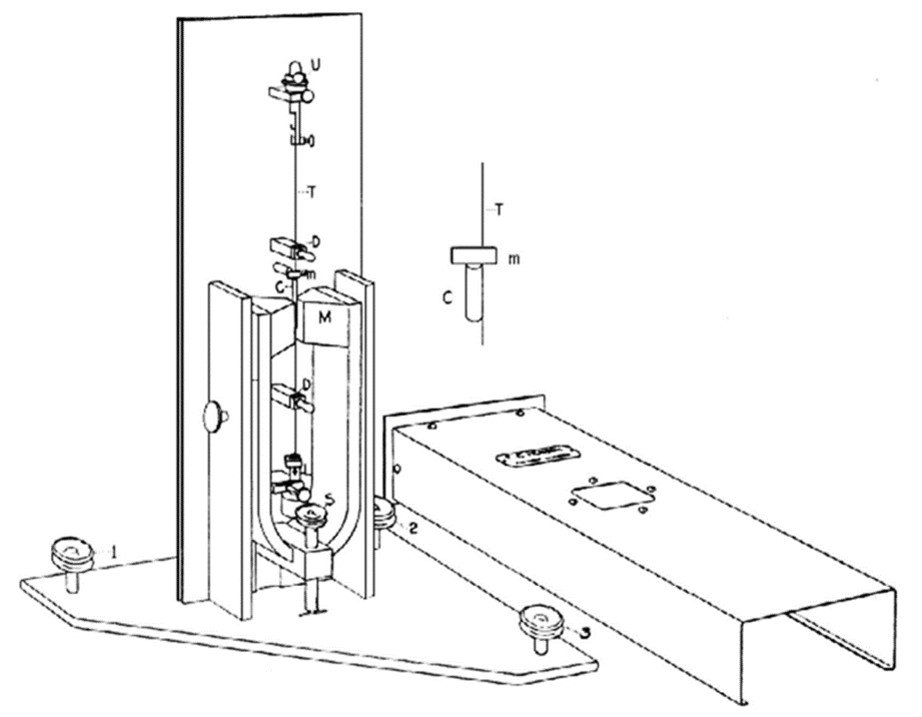
onde A é a amplitude do traço registrado em um sismógrafo Wood-Anderson (Figura 1) a uma distância de 100 km e A0 é a amplitude do terremoto de referência com ML igual a 0.0. Na definição usual, um terremoto de magnitude 0 tem amplitude igual a 1 mícron a uma distância de 100 km (Shearer, 2009).
Figura 1. Sismômetro de torsão Wood-Anderson. Esse é o tipo de instrumento utilizado para definir a escala ML.
A escala ML possui certas desvantagens apreciáveis. Por exemplo, se a estação de trabalho não estiver a 100 km do terremoto observado, faz-se necessário o uso de uma correção para efeitos de propagação – algo que pode ser difícil, pois, a diferentes níveis de profundidade, a maior amplitude pode ser registrada por diferentes tipos de onda. Ademais, a escala não contempla terremotos registrados a distância superior a 300 km, tornando-a inadequada para monitoramento sísmico em escala global. Consequentemente, a comunidade sismológica acabou abandonando a escala original de Richter em prol de modelos mais precisos.
Uma das primeiras escalas aprimoradas com utilidade global foi a magnitude de onda de corpo, mb. Esta é geralmente estabelecida com base em medidas realizadas nos ciclos iniciais registrados por ondas P em instrumentos de período curto. Outra abordagem é a magnitude de onda superficial, MS, que é baseada na amplitude registrada por ondas de Rayleigh em um período de 20 segundos. A magnitude de onda superficial é dada pela relação

onde A, T e
2. Magnitude de momento
O chamado momento sísmico de um terremoto é dado por

onde 
Uma desvantagem crucial das escalas de magnitude, sejam elas baseadas em ondas de corpo ou ondas superficiais, é que elas ‘saturam’, ou seja, não fornecem valores suficientemente grandes para terremotos muito fortes. Em vista dessa limitação, estabeleceu-se a magnitude de momento, Mw, que é uma medida mais confiável do que mb ou MS. A magnitude de momento é uma função logarítmica do momento sísmico:

com M0 dado em N·m. Ao contrário de outras escalas de magnitude, Mw não se satura em sua porção superior. Pela relação logarítmica acima, um acréscimo de uma unidade na magnitude de momento de um terremoto implica uma área de ruptura 32 vezes maior.
3. Lei de Gutenberg-Richter
Como esperaríamos, terremotos de menor magnitude são mais frequentes do que terremotos mais severos. Cerca de 10,000 terremotos de magnitude maior que 4 ocorrem a cada ano; por outro lado, cerca de 20 terremotos com mb ou MS maior que 7 ocorrem ao longo do mesmo período, e raros são os anos em que mais do que um terremoto raso de magnitude 8 ou superior é registrado pela comunidade geocientífica (Tabela 1) (Fowler, 2005). Em geral, existe uma relação linear entre a magnitude de onda superficial MS e N, sendo N o número de terremotos com magnitude superior a MS ocorrendo em uma área por unidade de tempo:

onde a é uma constante e b é uma medida da abundância relativa de terremotos grandes e pequenos. O modelo estatístico representado pela equação (6) é conhecido como lei de Gutenberg-Richter. Podemos propor uma relação análoga para o número de terremotos em termos do momento sísmico M0:

Tabela 1. Distribuição anual de terremotos em escala global. Fonte: USGS.

4. Modelos de recorrência de terremotos
Para obras de engenharia e outras atividades econômicas, devemos caracterizar a atividade sísmica em uma área de interesse. Para tanto, a abordagem mais simples consiste do uso de modelos de recorrência de terremotos, que associam uma dada magnitude m* ao número médio de terremotos com tal magnitude no decurso de um ano. Seguindo o modelo de Gutenberg-Richter, podemos escrever:

onde vm é a frequência anual de excedência de terremotos com magnitude m*, ou seja, o número de terremotos com magnitude igual ou superior a m* esperados em um ano. Equipados com a distribuição de eventos sísmicos da área de interesse, podemos plotar o logaritmo de vm versus m* e ajustar os parâmetros a e b (Figura 2). No gráfico da Fig. 2, podemos notar que a frequência anual de excedência para um terremoto de magnitude 6, por exemplo, é aproximadamente igual a 0.02. O recíproco dessa taxa é o intervalo de recorrência para terremotos da referida magnitude, isto é, 1/0.02 = 50 anos. Isso significa que, na área de interesse, o intervalo médio entre ocorrências de terremotos de magnitude 6 é igual a 50 anos.
Figura 2. Frequência anual de excedência versus magnitude.

Em uma abordagem simples, a distribuição temporal de terremotos em uma área é modelada por um processo de Poisson. Colocamos ênfase no termo “simples”, pois, como o leitor deve saber, uma variável aleatória de Poisson pressupõe que os eventos representados são independentes entre si – uma hipótese que pode não ser verdadeira para modelagem de terremotos. O intervalo de tempo t em um processo de Poisson é o chamado tempo de exposição, e na prática é geralmente igualado ao tempo de vida de uma estrutura, como 50 ou 100 anos. A probabilidade de observarmos n eventos com magnitude superior a m* em um intervalo de tempo t é dada por

onde vm é dada pela equação (8). Para fins de dimensionamento, estamos particularmente interessados na probabilidade de que ao menos um evento de magnitude M > m* será registrado no decurso de um intervalo de tempo t. A probabilidade em questão é conhecida como probabilidade de excedência e pode ser calculada por meio da fórmula

Manipulando (10), podemos obter uma relação entre a probabilidade de excedência de um terremoto de magnitude m* (ou seja, P(M > m*)) e a frequência anual de excedência vm para um tempo de exposição t:

Exemplo
Suponha que, em uma área que abrigará uma obra de engenharia, o modelo de recorrência de terremotos ao longo de um ano é dado pela equação

Supondo que os terremotos podem ser descritos por um modelo de Poisson, calcule:
(A) A probabilidade de que pelo menos um terremoto de magnitude maior que 6 (m > 6) ocorrerá em intervalos de recorrência de 50 e 100 anos.
(B) A probabilidade de que exatamente um terremoto de magnitude maior que 6 (m > 6) ocorrerá com um intervalo de recorrência de 50 anos.
(C) A magnitude de terremoto que teria uma probabilidade de excedência igual a 10% em um intervalo de recorrência de 50 anos.
Solução. (A) Primeiramente, calculamos a frequência anual de excedência vm para terremotos de magnitude 6:


Em seguida, substituímos t = 50 anos e vm = 0.0631 na equação (10):


A probabilidade de que ao menos um terremoto de magnitude superior a 6 ocorrerá em um intervalo de 50 anos é igual a 95.7%. Repetindo para t = 100 anos:


É quase certo que um terremoto de magnitude igual ou superior a 6 ocorrerá em um intervalo de recorrência de 100 anos.
(B) A probabilidade de que exatamente um terremoto de magnitude maior que 6 ocorrerá nos próximos 50 anos é dada pela equação (9) com n = 1:


(C) Primeiramente, substituímos P(M > m*) = 0.1 (ou seja, 10%) e t = 50 anos na equação (11):

Em seguida, substituímos a frequência anual de excedência vm = 0.00211 na distribuição de terremotos e resolvemos para m*:

,



Ou seja, na área em foco, um terremoto de magnitude 7.64 tem probabilidade de excedência igual a 10% em um intervalo de recorrência igual a 50 anos.
Referências
- BEROZA, G.C. e KANAMORI, H. (2015). Earthquake Seismology: An Introduction and Overview. Em: SCHUBERT, G. (Ed.). Treatise on Geophysics. 2ª edição. Amsterdã: Elsevier.
- FOWLER, C.M.R. (2005). The Solid Earth: An Introduction to Global Geophysics. 2ª edição. Cambridge: Cambridge University Press.
- SHEARER, P.M. (2009). Introduction to Seismology. 2ª edição. Cambridge: Cambridge University Press.
- SUCUOGLU, H. e AKKAR, S. (2014). Basic Earthquake Engineering. Berlim/Heidelberg: Springer.





